
Page 767 - Mechanical Engineers' Handbook (Volume 2)
P. 767
758 Control System Design Using State-Space Methods
closed-loop pole locations are readily accommodated. Similarly, performance specifications
in the form of an index of performance to be optimized can be accommodated by optimal-
control theory if the index of performance belongs to a restricted class of performance
measures. In fact, recent efforts in control system design using state-space methods have
been directed at enhancing the problem formulation to accommodate a greater variety of
performance specifications. In spite of these enhancements, performance specifications such
as sensitivity of the controlled system performance to plant parameter variations and mod-
eling errors are accommodated more readily by frequency-domain-based design procedures
than by state-space or time-domain-based design procedures. Thus, control system design
techniques based on frequency-domain and time-domain approaches should be viewed as
being complementary to each other in some ways.
2 THE POLE PLACEMENT DESIGN METHOD
2.1 Regulation Problem
It can be shown that, if a linear time-invariant (LTI) system is completely state controllable
and if linear instantaneous state-variable feedback is used, the associated feedback gains can
be chosen to place the closed-loop poles of the controlled system at any arbitrarily specified
3
locations in the s-or z-plane, depending on whether the system is continuous time or discrete
time. Thus, if the continuous-time and discrete-time systems described by Eqs. (6) and (12),
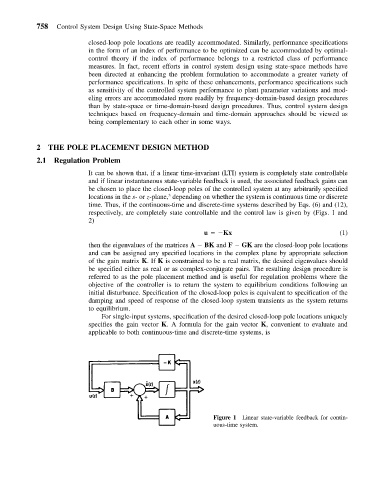
respectively, are completely state controllable and the control law is given by (Figs. 1 and
2)
u Kx (1)
then the eigenvalues of the matrices A BK and F GK are the closed-loop pole locations
and can be assigned any specified locations in the complex plane by appropriate selection
of the gain matrix K.If K is constrained to be a real matrix, the desired eigenvalues should
be specified either as real or as complex-conjugate pairs. The resulting design procedure is
referred to as the pole placement method and is useful for regulation problems where the
objective of the controller is to return the system to equilibrium conditions following an
initial disturbance. Specification of the closed-loop poles is equivalent to specification of the
damping and speed of response of the closed-loop system transients as the system returns
to equilibrium.
For single-input systems, specification of the desired closed-loop pole locations uniquely
specifies the gain vector K. A formula for the gain vector K, convenient to evaluate and
applicable to both continuous-time and discrete-time systems, is
Figure 1 Linear state-variable feedback for contin-
uous-time system.