
Page 771 - Mechanical Engineers' Handbook (Volume 2)
P. 771
762 Control System Design Using State-Space Methods
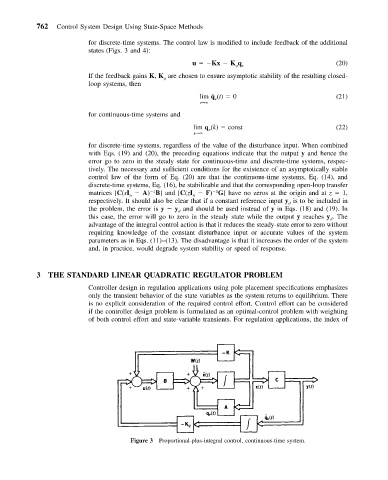
for discrete-time systems. The control law is modified to include feedback of the additional
states (Figs. 3 and 4):
u Kx Kq (20)
qe
If the feedback gains K, K are chosen to ensure asymptotic stability of the resulting closed-
q
loop systems, then
lim ˙q (t) 0 (21)
e
t→
for continuous-time systems and
lim q (k) const (22)
e
k→
for discrete-time systems, regardless of the value of the disturbance input. When combined
with Eqs. (19) and (20), the preceding equations indicate that the output y and hence the
error go to zero in the steady state for continuous-time and discrete-time systems, respec-
tively. The necessary and sufficient conditions for the existence of an asymptotically stable
control law of the form of Eq. (20) are that the continuous-time systems, Eq. (14), and
discrete-time systems, Eq. (16), be stabilizable and that the corresponding open-loop transfer
1
1
matrices [C(sI A) B] and [C(zI F) G] have no zeros at the origin and at z 1,
n
n
respectively. It should also be clear that if a constant reference input y is to be included in
d
the problem, the error is y y and should be used instead of y in Eqs. (18) and (19). In
d
this case, the error will go to zero in the steady state while the output y reaches y . The
d
advantage of the integral control action is that it reduces the steady-state error to zero without
requiring knowledge of the constant disturbance input or accurate values of the system
parameters as in Eqs. (11)–(13). The disadvantage is that it increases the order of the system
and, in practice, would degrade system stability or speed of response.
3 THE STANDARD LINEAR QUADRATIC REGULATOR PROBLEM
Controller design in regulation applications using pole placement specifications emphasizes
only the transient behavior of the state variables as the system returns to equilibrium. There
is no explicit consideration of the required control effort. Control effort can be considered
if the controller design problem is formulated as an optimal-control problem with weighting
of both control effort and state-variable transients. For regulation applications, the index of
Figure 3 Proportional-plus-integral control, continuous-time system.