
Page 776 - Mechanical Engineers' Handbook (Volume 2)
P. 776
3 The Standard Linear Quadratic Regulator Problem 767
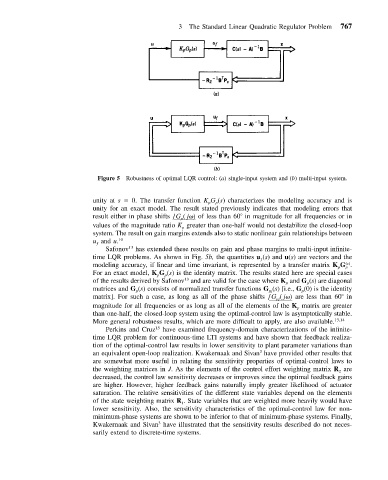
Figure 5 Robustness of optimal LQR control: (a) single-input system and (b) multi-input system.
unity at s 0. The transfer function K G (s) characterizes the modeling accuracy and is
p
p
unity for an exact model. The result stated previously indicates that modeling errors that
result either in phase shifts G ( j ) of less than 60 in magnitude for all frequencies or in
/
p
values of the magnitude ratio K greater than one-half would not destabilize the closed-loop
p
system. The result on gain margins extends also to static nonlinear gain relationships between
u and u. 10
ƒ
13
Safonov has extended these results on gain and phase margins to multi-input infinite-
time LQR problems. As shown in Fig. 5b, the quantities u (s) and u(s) are vectors and the
ƒ
(s)
modeling accuracy, if linear and time invariant, is represented by a transfer matrix KG .
p p
For an exact model, K G (s) is the identity matrix. The results stated here are special cases
p
p
13
of the results derived by Safonov and are valid for the case where K and G (s) are diagonal
p p
matrices and G (s) consists of normalized transfer functions G (s) [i.e., G (0) is the identity
p pj p
matrix]. For such a case, as long as all of the phase shifts G ( j ) are less than 60 in
/
pj
magnitude for all frequencies or as long as all of the elements of the K matrix are greater
p
than one-half, the closed-loop system using the optimal-control law is asymptotically stable.
More general robustness results, which are more difficult to apply, are also available. 13,14
Perkins and Cruz 15 have examined frequency-domain characterizations of the infinite-
time LQR problem for continuous-time LTI systems and have shown that feedback realiza-
tion of the optimal-control law results in lower sensitivity to plant parameter variations than
3
an equivalent open-loop realization. Kwakernaak and Sivan have provided other results that
are somewhat more useful in relating the sensitivity properties of optimal-control laws to
the weighting matrices in J. As the elements of the control effort weighting matrix R are
2
decreased, the control law sensitivity decreases or improves since the optimal feedback gains
are higher. However, higher feedback gains naturally imply greater likelihood of actuator
saturation. The relative sensitivities of the different state variables depend on the elements
of the state weighting matrix R . State variables that are weighted more heavily would have
1
lower sensitivity. Also, the sensitivity characteristics of the optimal-control law for non-
minimum-phase systems are shown to be inferior to that of minimum-phase systems. Finally,
Kwakernaak and Sivan have illustrated that the sensitivity results described do not neces-
3
sarily extend to discrete-time systems.