
Page 781 - Mechanical Engineers' Handbook (Volume 2)
P. 781
772 Control System Design Using State-Space Methods
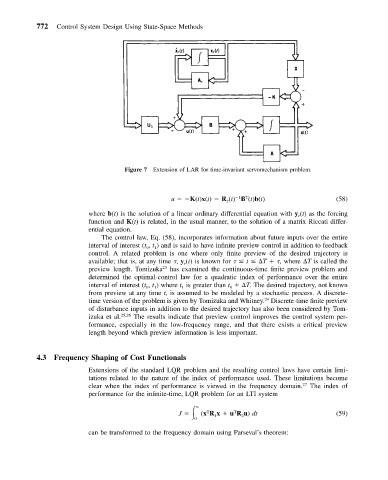
Figure 7 Extension of LAR for time-invariant servomechanism problem.
T
1
u K(t)x(t) R (t) B (t)b(t) (58)
2
where b(t) is the solution of a linear ordinary differential equation with y (t) as the forcing
r
function and K(t) is related, in the usual manner, to the solution of a matrix Riccati differ-
ential equation.
The control law, Eq. (58), incorporates information about future inputs over the entire
interval of interest (t , t ) and is said to have infinite preview control in addition to feedback
0 1
control. A related problem is one where only finite preview of the desired trajectory is
available; that is, at any time , y (t) is known for t T , where T is called the
r
preview length. Tomizuka 23 has examined the continuous-time finite preview problem and
determined the optimal-control law for a quadratic index of performance over the entire
interval of interest (t , t ) where t is greater than t T. The desired trajectory, not known
0 1 1 0
from preview at any time t, is assumed to be modeled by a stochastic process. A discrete-
24
time version of the problem is given by Tomizuka and Whitney. Discrete-time finite preview
of disturbance inputs in addition to the desired trajectory has also been considered by Tom-
izuka et al. 25,26 The results indicate that preview control improves the control system per-
formance, especially in the low-frequency range, and that there exists a critical preview
length beyond which preview information is less important.
4.3 Frequency Shaping of Cost Functionals
Extensions of the standard LQR problem and the resulting control laws have certain limi-
tations related to the nature of the index of performance used. These limitations become
clear when the index of performance is viewed in the frequency domain. 27 The index of
performance for the infinite-time, LQR problem for an LTI system
T
T
J (xR x uR u) dt (59)
1
2
0
can be transformed to the frequency domain using Parseval’s theorem: