
Page 784 - Mechanical Engineers' Handbook (Volume 2)
P. 784
4 Extensions of the Linear Quadratic Regulator Problem 775
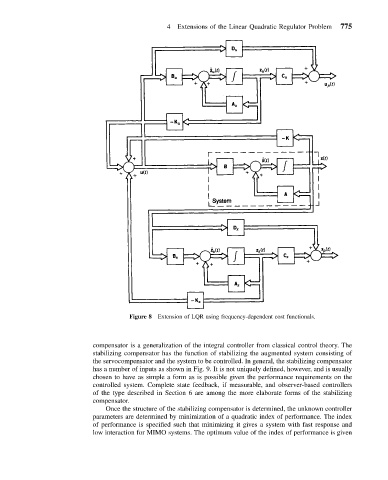
Figure 8 Extension of LQR using frequency-dependent cost functionals.
compensator is a generalization of the integral controller from classical control theory. The
stabilizing compensator has the function of stabilizing the augmented system consisting of
the servocompensator and the system to be controlled. In general, the stabilizing compensator
has a number of inputs as shown in Fig. 9. It is not uniquely defined, however, and is usually
chosen to have as simple a form as is possible given the performance requirements on the
controlled system. Complete state feedback, if measurable, and observer-based controllers
of the type described in Section 6 are among the more elaborate forms of the stabilizing
compensator.
Once the structure of the stabilizing compensator is determined, the unknown controller
parameters are determined by minimization of a quadratic index of performance. The index
of performance is specified such that minimizing it gives a system with fast response and
low interaction for MIMO systems. The optimum value of the index of performance is given