
Page 785 - Mechanical Engineers' Handbook (Volume 2)
P. 785
776 Control System Design Using State-Space Methods
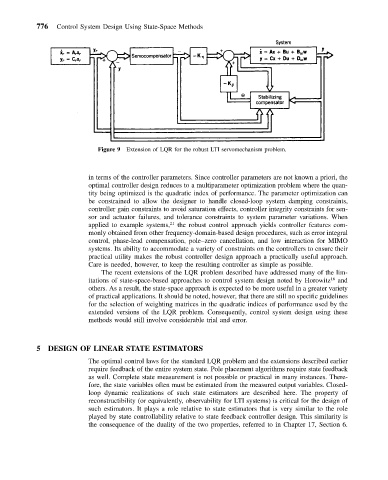
Figure 9 Extension of LQR for the robust LTI servomechanism problem.
in terms of the controller parameters. Since controller parameters are not known a priori, the
optimal controller design reduces to a multiparameter optimization problem where the quan-
tity being optimized is the quadratic index of performance. The parameter optimization can
be constrained to allow the designer to handle closed-loop system damping constraints,
controller gain constraints to avoid saturation effects, controller integrity constraints for sen-
sor and actuator failures, and tolerance constraints to system parameter variations. When
applied to example systems, 21 the robust control approach yields controller features com-
monly obtained from other frequency-domain-based design procedures, such as error integral
control, phase-lead compensation, pole–zero cancellation, and low interaction for MIMO
systems. Its ability to accommodate a variety of constraints on the controllers to ensure their
practical utility makes the robust controller design approach a practically useful approach.
Care is needed, however, to keep the resulting controller as simple as possible.
The recent extensions of the LQR problem described have addressed many of the lim-
itations of state-space-based approaches to control system design noted by Horowitz 16 and
others. As a result, the state-space approach is expected to be more useful in a greater variety
of practical applications. It should be noted, however, that there are still no specific guidelines
for the selection of weighting matrices in the quadratic indices of performance used by the
extended versions of the LQR problem. Consequently, control system design using these
methods would still involve considerable trial and error.
5 DESIGN OF LINEAR STATE ESTIMATORS
The optimal control laws for the standard LQR problem and the extensions described earlier
require feedback of the entire system state. Pole placement algorithms require state feedback
as well. Complete state measurement is not possible or practical in many instances. There-
fore, the state variables often must be estimated from the measured output variables. Closed-
loop dynamic realizations of such state estimators are described here. The property of
reconstructibility (or equivalently, observability for LTI systems) is critical for the design of
such estimators. It plays a role relative to state estimators that is very similar to the role
played by state controllability relative to state feedback controller design. This similarity is
the consequence of the duality of the two properties, referred to in Chapter 17, Section 6.