
Page 786 - Mechanical Engineers' Handbook (Volume 2)
P. 786
5 Design of Linear State Estimators 777
Therefore, many of the results presented in this section parallel those of the preceding section
on controller design.
5.1 The Observer
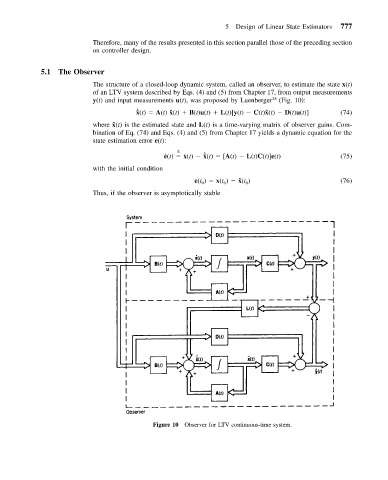
The structure of a closed-loop dynamic system, called an observer, to estimate the state x(t)
of an LTV system described by Eqs. (4) and (5) from Chapter 17, from output measurements
28
y(t) and input measurements u(t), was proposed by Luenberger (Fig. 10):
˙ ˆ x(t) A(t) ˆx(t) B(t)u(t) L(t)[y(t) C(t)ˆx(t) D(t)u(t)] (74)
where ˆx(t) is the estimated state and L(t) is a time-varying matrix of observer gains. Com-
bination of Eq. (74) and Eqs. (4) and (5) from Chapter 17 yields a dynamic equation for the
state estimation error e(t):
˙
˙ e(t) ˙x(t) ˆx(t) [A(t) L(t)C(t)]e(t) (75)
with the initial condition
e(t ) x(t ) ˆx(t ) (76)
0
0
0
Thus, if the observer is asymptotically stable
Figure 10 Observer for LTV continuous-time system.