
Page 448 - Sensors and Control Systems in Manufacturing
P. 448
402
Ei g h t
Cha p te r
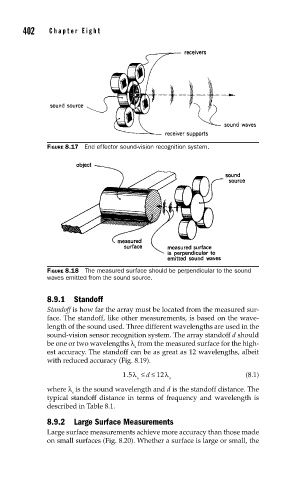
FIGURE 8.17 End effector sound-vision recognition system.
FIGURE 8.18 The measured surface should be perpendicular to the sound
waves emitted from the sound source.
8.9.1 Standoff
Standoff is how far the array must be located from the measured sur-
face. The standoff, like other measurements, is based on the wave-
length of the sound used. Three different wavelengths are used in the
sound-vision sensor recognition system. The array standoff d should
be one or two wavelengths λ from the measured surface for the high-
s
est accuracy. The standoff can be as great as 12 wavelengths, albeit
with reduced accuracy (Fig. 8.19).
d
.
15λ ≤≤ 12λ (8.1)
s s
where λ is the sound wavelength and d is the standoff distance. The
s
typical standoff distance in terms of frequency and wavelength is
described in Table 8.1.
8.9.2 Large Surface Measurements
Large surface measurements achieve more accuracy than those made
on small surfaces (Fig. 8.20). Whether a surface is large or small, the