
Page 452 - Sensors and Control Systems in Manufacturing
P. 452
406
Cha p te r
Ei g h t
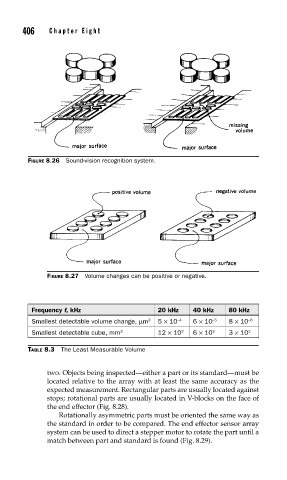
FIGURE 8.26 Sound-vision recognition system.
FIGURE 8.27 Volume changes can be positive or negative.
Frequency f, kHz 20 kHz 40 kHz 80 kHz
Smallest detectable volume change, μm 3 5 × 10 –4 6 × 10 –5 8 × 10 –6
Smallest detectable cube, mm 3 12 × 10 2 6 × 10 2 3 × 10 2
TABLE 8.3 The Least Measurable Volume
two. Objects being inspected—either a part or its standard—must be
located relative to the array with at least the same accuracy as the
expected measurement. Rectangular parts are usually located against
stops; rotational parts are usually located in V-blocks on the face of
the end effector (Fig. 8.28).
Rotationally asymmetric parts must be oriented the same way as
the standard in order to be compared. The end effector sensor array
system can be used to direct a stepper motor to rotate the part until a
match between part and standard is found (Fig. 8.29).