
Page 1039 - The Mechatronics Handbook
P. 1039
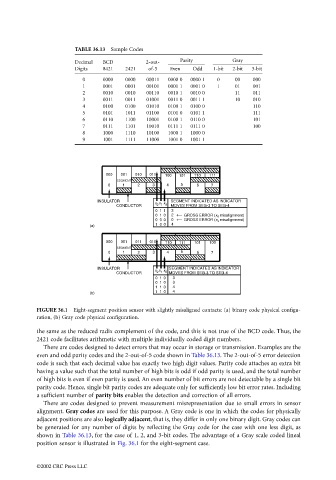
TABLE 36.13 Sample Codes
Decimal BCD 2-out- Parity Gray
Digits 8421 2421 of-5 Even Odd 1-bit 2-bit 3-bit
0 0000 0000 00011 0000 0 0000 1 0 00 000
1 0001 0001 00101 0001 1 0001 0 1 01 001
2 0010 0010 00110 0010 1 0010 0 11 011
3 0011 0011 01001 0011 0 0011 1 10 010
4 0100 0100 01010 0100 1 0100 0 110
5 0101 1011 01100 0101 0 0101 1 111
6 0110 1100 10001 0100 1 0110 0 101
7 0111 1101 10010 0111 1 0111 0 100
8 1000 1110 10100 1000 1 1000 0
9 1001 1111 11000 1001 0 1001 1
000 001 010 011 100 101 110 111
SEGMENT
0 1 2 3 4 5 6 7
INSULATOR x SEGMENT INDICATED AS INDICATOR
CONDUCTOR x 2 1 x 0 MOVES FROM SEG-3 TO SEG-4
0 1 1 3
0 1 0 2 GROSS ERROR (x misalignment)
0
0 0 0 0 GROSS ERROR (x misalignment)
2
(a) 1 0 0 4
000 001 011 010 110 111 101 100
SEGMENT
0 1 2 3 4 5 6 7
INSULATOR x SEGMENT INDICATED AS INDICATOR
CONDUCTOR x 2 1 x 0 MOVES FROM SEG-3 TO SEG-4
0 1 0 3
0 1 0 3
1 1 0 4
(b) 1 1 0 4
FIGURE 36.1 Eight-segment position sensor with slightly misaligned contacts: (a) binary code physical configu-
ration, (b) Gray code physical configuration.
the same as the reduced radix complement of the code, and this is not true of the BCD code. Thus, the
2421 code facilitates arithmetic with multiple individually coded digit numbers.
There are codes designed to detect errors that may occur in storage or transmission. Examples are the
even and odd parity codes and the 2-out-of-5 code shown in Table 36.13. The 2-out-of-5 error detection
code is such that each decimal value has exactly two high digit values. Parity code attaches an extra bit
having a value such that the total number of high bits is odd if odd parity is used, and the total number
of high bits is even if even parity is used. An even number of bit errors are not detectable by a single bit
parity code. Hence, single bit parity codes are adequate only for sufficiently low bit error rates. Including
a sufficient number of parity bits enables the detection and correction of all errors.
There are codes designed to prevent measurement misrepresentation due to small errors in sensor
alignment. Gray codes are used for this purpose. A Gray code is one in which the codes for physically
adjacent positions are also logically adjacent, that is, they differ in only one binary digit. Gray codes can
be generated for any number of digits by reflecting the Gray code for the case with one less digit, as
shown in Table 36.13, for the case of 1, 2, and 3-bit codes. The advantage of a Gray scale coded lineal
position sensor is illustrated in Fig. 36.1 for the eight-segment case.
©2002 CRC Press LLC