
Page 484 - Air Pollution Control Engineering
P. 484
12_ch_wang.qxd 05/05/2004 5:26 pm Page 456
456 Lawerence K. Wang et al.
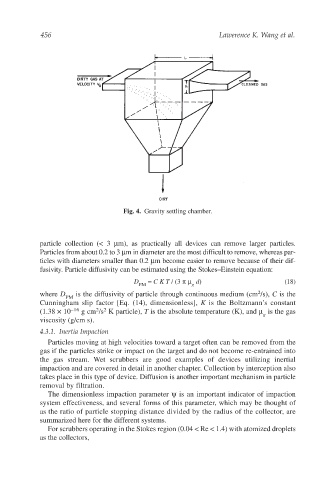
Fig. 4. Gravity settling chamber.
particle collection (< 3 µm), as practically all devices can remove larger particles.
Particles from about 0.2 to 3 µm in diameter are the most difficult to remove, whereas par-
ticles with diameters smaller than 0.2 µm become easier to remove because of their dif-
fusivity. Particle diffusivity can be estimated using the Stokes–Einstein equation:
D = C K T / (3 πµ d) (18)
PM g
2
where D is the diffusivity of particle through continuous medium (cm /s), C is the
PM
Cunningham slip factor [Eq. (14), dimensionless], K is the Boltzmann’s constant
2
2
(1.38 × 10 −16 g cm /s K particle), T is the absolute temperature (K), and µ is the gas
g
viscosity (g/cm s).
4.3.1. Inertia Impaction
Particles moving at high velocities toward a target often can be removed from the
gas if the particles strike or impact on the target and do not become re-entrained into
the gas stream. Wet scrubbers are good examples of devices utilizing inertial
impaction and are covered in detail in another chapter. Collection by interception also
takes place in this type of device. Diffusion is another important mechanism in particle
removal by filtration.
The dimensionless impaction parameter ψ is an important indicator of impaction
system effectiveness, and several forms of this parameter, which may be thought of
as the ratio of particle stopping distance divided by the radius of the collector, are
summarized here for the different systems.
For scrubbers operating in the Stokes region (0.04 < Re < 1.4) with atomized droplets
as the collectors,