
Page 39 - Biomimetics : Biologically Inspired Technologies
P. 39
Bar-Cohen : Biomimetics: Biologically Inspired Technologies DK3163_c001 Final Proof page 25 21.9.2005 6:40pm
Introduction to Biomimetics 25
1.7.2 MEMS-Based Flow Detector Mimicking Hair Cells with Cilium
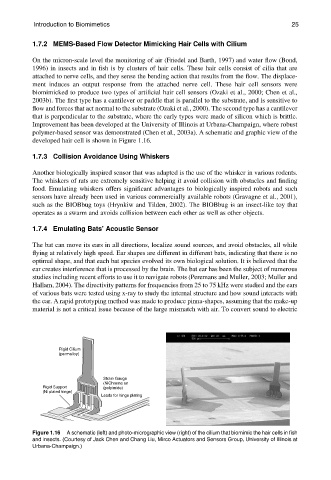
On the micron-scale level the monitoring of air (Friedel and Barth, 1997) and water flow (Bond,
1996) in insects and in fish is by clusters of hair cells. These hair cells consist of cilia that are
attached to nerve cells, and they sense the bending action that results from the flow. The displace-
ment induces an output response from the attached nerve cell. These hair cell sensors were
biomimicked to produce two types of artificial hair cell sensors (Ozaki et al., 2000; Chen et al.,
2003b). The first type has a cantilever or paddle that is parallel to the substrate, and is sensitive to
flow and forces that act normal to the substrate (Ozaki et al., 2000). The second type has a cantilever
that is perpendicular to the substrate, where the early types were made of silicon which is brittle.
Improvement has been developed at the University of Illinois at Urbana-Champaign, where robust
polymer-based sensor was demonstrated (Chen et al., 2003a). A schematic and graphic view of the
developed hair cell is shown in Figure 1.16.
1.7.3 Collision Avoidance Using Whiskers
Another biologically inspired sensor that was adapted is the use of the whisker in various rodents.
The whiskers of rats are extremely sensitive helping it avoid collision with obstacles and finding
food. Emulating whiskers offers significant advantages to biologically inspired robots and such
sensors have already been used in various commercially available robots (Gravagne et al., 2001),
such as the BIOBbug toys (Hrynkiw and Tilden, 2002). The BIOBbug is an insect-like toy that
operates as a swarm and avoids collision between each other as well as other objects.
1.7.4 Emulating Bats’ Acoustic Sensor
The bat can move its ears in all directions, localize sound sources, and avoid obstacles, all while
flying at relatively high speed. Ear shapes are different in different bats, indicating that there is no
optimal shape, and that each bat species evolved its own biological solution. It is believed that the
ear creates interference that is processed by the brain. The bat ear has been the subject of numerous
studies including recent efforts to use it to navigate robots (Peremans and Muller, 2003; Muller and
Hallam, 2004). The directivity patterns for frequencies from 25 to 75 kHz were studied and the ears
of various bats were tested using x-ray to study the internal structure and how sound interacts with
the ear. A rapid prototyping method was made to produce pinna-shapes, assuming that the make-up
material is not a critical issue because of the large mismatch with air. To convert sound to electric
Rigid Cilium
(permalloy)
Strain Gauge
(NiChrome on
Rigid Support (polyimide)
(Ni plated hinge)
Leads for hinge plating
Figure 1.16 A schematic (left) and photo-micrographic view (right) of the cilium that biomimic the hair cells in fish
and insects. (Courtesy of Jack Chen and Chang Liu, Mirco Actuators and Sensors Group, University of Illinois at
Urbana-Champaign.)