
Page 178 - Build Your Own Combat Robot
P. 178
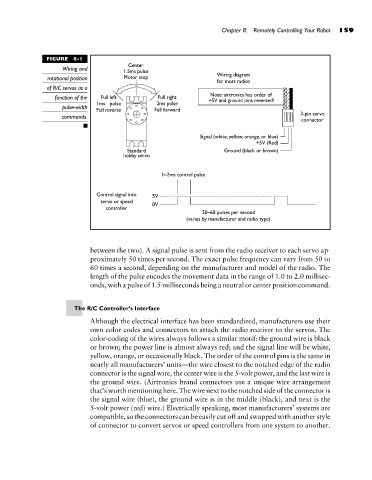
FIGURE 8-1 Chapter 8: Remotely Controlling Your Robot 159
Wiring and
rotational position
of R/C servos as a
function of the
pulse-width
commands.
between the two). A signal pulse is sent from the radio receiver to each servo ap-
proximately 50 times per second. The exact pulse frequency can vary from 50 to
60 times a second, depending on the manufacturer and model of the radio. The
length of the pulse encodes the movement data in the range of 1.0 to 2.0 millisec-
onds, with a pulse of 1.5 milliseconds being a neutral or center position command.
The R/C Controller’s Interface
Although the electrical interface has been standardized, manufacturers use their
own color codes and connectors to attach the radio receiver to the servos. The
color-coding of the wires always follows a similar motif: the ground wire is black
or brown; the power line is almost always red; and the signal line will be white,
yellow, orange, or occasionally black. The order of the control pins is the same in
nearly all manufacturers’ units—the wire closest to the notched edge of the radio
connector is the signal wire, the center wire is the 5-volt power, and the last wire is
the ground wire. (Airtronics brand connectors use a unique wire arrangement
that’s worth mentioning here. The wire next to the notched side of the connector is
the signal wire (blue), the ground wire is in the middle (black), and next is the
5-volt power (red) wire.) Electrically speaking, most manufacturers’ systems are
compatible, so the connectors can be easily cut off and swapped with another style
of connector to convert servos or speed controllers from one system to another.