
Page 263 - Concise Encyclopedia of Robotics
P. 263
QUADRUPED ROBOT Q
Historically, people have been fond of the idea of building a robot in the
human image. Such a machine has two legs. In practice, a two-legged, or
bipedal, robot is difficult to design. It tends to have a poor sense of balance;
it falls over easily. The sense of balance, which humans take for granted,
is difficult to build into a machine.(Specialized two-wheel robots have been
designed that incorporate a sense of balance, but they are sophisticated
and costly.)
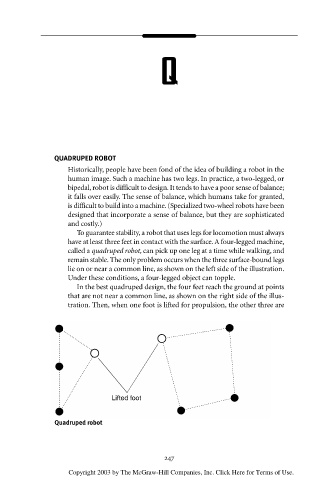
To guarantee stability,a robot that uses legs for locomotion must always
have at least three feet in contact with the surface.A four-legged machine,
called a quadruped robot, can pick up one leg at a time while walking, and
remain stable. The only problem occurs when the three surface-bound legs
lie on or near a common line, as shown on the left side of the illustration.
Under these conditions, a four-legged object can topple.
In the best quadruped design, the four feet reach the ground at points
that are not near a common line, as shown on the right side of the illus-
tration. Then, when one foot is lifted for propulsion, the other three are
Lifted foot
Quadruped robot
Copyright 2003 by The McGraw-Hill Companies, Inc. Click Here for Terms of Use.