
Page 334 - Concise Encyclopedia of Robotics
P. 334
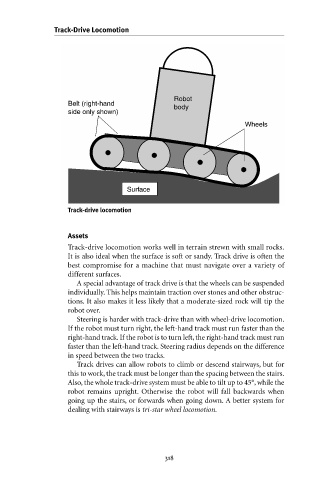
Track-Drive Locomotion
Robot
Belt (right-hand
body
side only shown)
Wheels
Surface
Track-drive locomotion
Assets
Track-drive locomotion works well in terrain strewn with small rocks.
It is also ideal when the surface is soft or sandy. Track drive is often the
best compromise for a machine that must navigate over a variety of
different surfaces.
A special advantage of track drive is that the wheels can be suspended
individually. This helps maintain traction over stones and other obstruc-
tions. It also makes it less likely that a moderate-sized rock will tip the
robot over.
Steering is harder with track-drive than with wheel-drive locomotion.
If the robot must turn right, the left-hand track must run faster than the
right-hand track. If the robot is to turn left, the right-hand track must run
faster than the left-hand track. Steering radius depends on the difference
in speed between the two tracks.
Track drives can allow robots to climb or descend stairways, but for
this to work, the track must be longer than the spacing between the stairs.
Also, the whole track-drive system must be able to tilt up to 45°, while the
robot remains upright. Otherwise the robot will fall backwards when
going up the stairs, or forwards when going down. A better system for
dealing with stairways is tri-star wheel locomotion.
