
Page 71 - Concise Encyclopedia of Robotics
P. 71
Controller
For a robot to move along a smooth, continuous path, every point
along the way must, in theory, be stored in the controller memory. Of
course, this is not literally possible, because a continuous path contains
an infinite number of points. Continuous-path motion uses mathematical
functions, rather than point sets, to define the instantaneous position of a
robot manipulator.
In the function method, the instantaneous position is stored as a set of
mathematical functions. Such motion is truly continuous, in that it actually
passes through an infinite number of points. This is possible because of
the smooth nature of the mathematical functions. This principle is the
robot-motion analog of vector graphics in computing. Compare POINT-TO-
POINT MOTION.
CONTROLLER
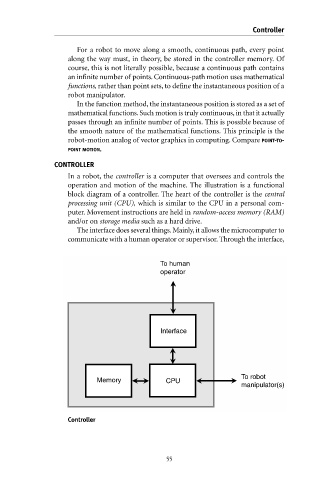
In a robot, the controller is a computer that oversees and controls the
operation and motion of the machine. The illustration is a functional
block diagram of a controller. The heart of the controller is the central
processing unit (CPU), which is similar to the CPU in a personal com-
puter. Movement instructions are held in random-access memory (RAM)
and/or on storage media such as a hard drive.
The interface does several things.Mainly,it allows the microcomputer to
communicate with a human operator or supervisor. Through the interface,
To human
operator
Interface
To robot
Memory CPU
manipulator(s)
Controller
