
Page 24 - Dynamic Vision for Perception and Control of Motion
P. 24
8 1 Introduction
the neighboring lane is assumed to initiate a lane change. If this occurs within the
safety margin in front, egomotion should be adjusted to this (improper) behavior of
other traffic participants. This shows that recognition of the intention of other sub-
jects is important for a defensive style of driving. This cannot be recognized with-
out knowledge of temporally extended maneuvers and without observing behav-
ioral patterns of subjects in the environment. Question 3 above, thus, is not
answered by interpreting image patterns directly but by observing symbolic repre-
sentations resulting as answers to question 2 for a number of individual ob-
jects/subjects over an extended period of time.
Simultaneous interpretation of image sequences on multiple scales in 3-D space
and time is the way to satisfy all requirements for safe and goal-oriented behavior.
1.4.1 Differential Models for Perception “Here and Now”
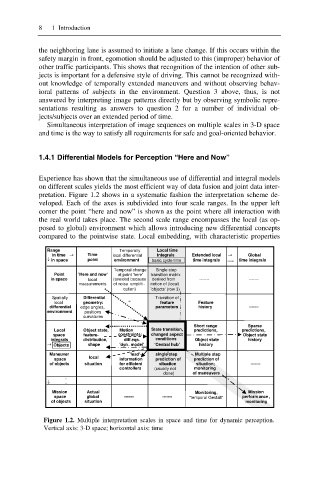
Experience has shown that the simultaneous use of differential and integral models
on different scales yields the most efficient way of data fusion and joint data inter-
pretation. Figure 1.2 shows in a systematic fashion the interpretation scheme de-
veloped. Each of the axes is subdivided into four scale ranges. In the upper left
corner the point “here and now” is shown as the point where all interaction with
the real world takes place. The second scale range encompasses the local (as op-
posed to global) environment which allows introducing new differential concepts
compared to the pointwise state. Local embedding, with characteristic properties
Range Temporally Local time
in time o Time local differential integrals Extended local o Global
p in space point environment basic cycle time time integrals ...... time integrals
Temporal change Single step
Point ‘Here and now' at point 'here' transition matrix
in space local (avoided because derived from ------- -------
measurements of noise amplifi - notion of (local)
cation) 'objects' (row 3)
Spatially Differential Transition of
local geometry: " feature Feature
differential edge angles, parameters history -------
environment positions
curvatures
Short range Sparse
Local Object state, Motion State transition, predictions, predictions,
space feature- constraints: changed aspect >Object state
integrals distribution, diff.eqs. conditions Object state history
o Objects shape 'dyn. model' ‘Central hub' history
Maneuver 'lead'- single step Multiple step
space local information prediction of prediction of
of objects situation for efficient situation situation; -------
controllers (usually not monitoring
done) of maneuvers
. .
p . .
Mission Actual Monitoring, Mission
space global ------- ------- “temporal Gestalt” performance,
of objects situation monitoring
Figure 1.2. Multiple interpretation scales in space and time for dynamic perception.
Vertical axis: 3-D space; horizontal axis: time