
Page 250 - Flexible Robotics in Medicine
P. 250
Soft-bodied flexible bending mechanism with silent shape memory alloys 239
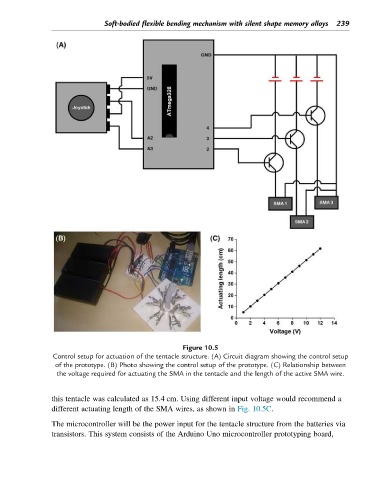
Figure 10.5
Control setup for actuation of the tentacle structure. (A) Circuit diagram showing the control setup
of the prototype. (B) Photo showing the control setup of the prototype. (C) Relationship between
the voltage required for actuating the SMA in the tentacle and the length of the active SMA wire.
this tentacle was calculated as 15.4 cm. Using different input voltage would recommend a
different actuating length of the SMA wires, as shown in Fig. 10.5C.
The microcontroller will be the power input for the tentacle structure from the batteries via
transistors. This system consists of the Arduino Uno microcontroller prototyping board,