
Page 32 - Hacking Roomba
P. 32
Chapter 1 — Getting Started with Roomba 13
Internal and External Components
Although it’s not necessary to know the details of the insides of Roomba to do the projects in
this book, it is instructive and neat. Knowing how something works can help you diagnose any
problems that are encountered during normal use.
The Underside
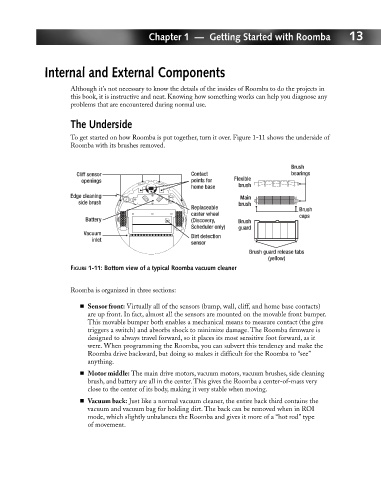
To get started on how Roomba is put together, turn it over. Figure 1-11 shows the underside of
Roomba with its brushes removed.
Brush
Cliff sensor Contact bearings
openings points for Flexible
home base brush
Edge cleaning Main
side brush brush
Replaceable Brush
caster wheel caps
Battery (Discovery, Brush
Scheduler only) guard
Vacuum Dirt detection
inlet
sensor
Brush guard release tabs
(yellow)
FIGURE 1-11: Bottom view of a typical Roomba vacuum cleaner
Roomba is organized in three sections:
Sensor front: Virtually all of the sensors (bump, wall, cliff, and home base contacts)
are up front. In fact, almost all the sensors are mounted on the movable front bumper.
This movable bumper both enables a mechanical means to measure contact (the give
triggers a switch) and absorbs shock to minimize damage. The Roomba firmware is
designed to always travel forward, so it places its most sensitive foot forward, as it
were. When programming the Roomba, you can subvert this tendency and make the
Roomba drive backward, but doing so makes it difficult for the Roomba to “see”
anything.
Motor middle: The main drive motors, vacuum motors, vacuum brushes, side cleaning
brush, and battery are all in the center. This gives the Roomba a center-of-mass very
close to the center of its body, making it very stable when moving.
Vacuum back: Just like a normal vacuum cleaner, the entire back third contains the
vacuum and vacuum bag for holding dirt. The back can be removed when in ROI
mode, which slightly unbalances the Roomba and gives it more of a “hot rod” type
of movement.