
Page 202 - Handbook of Biomechatronics
P. 202
Upper-Limb Prosthetic Devices 199
Agonist and antagonist
muscles
Master
device
for agonist
F ag X m
F ant Slave
⋅ motor
q s
Residual arm F ant F ag
Master
device
for antagonist
T s
Slave-prosthesis
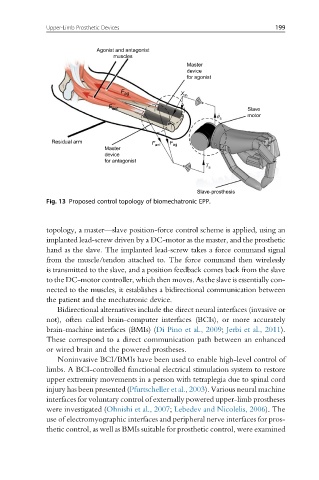
Fig. 13 Proposed control topology of biomechatronic EPP.
topology, a master—slave position-force control scheme is applied, using an
implanted lead-screw driven by a DC-motor as the master, and the prosthetic
hand as the slave. The implanted lead-screw takes a force command signal
from the muscle/tendon attached to. The force command then wirelessly
is transmitted to the slave, and a position feedback comes back from the slave
to the DC-motor controller, which then moves. As the slave is essentially con-
nected to the muscles, it establishes a bidirectional communication between
the patient and the mechatronic device.
Bidirectional alternatives include the direct neural interfaces (invasive or
not), often called brain-computer interfaces (BCIs), or more accurately
brain-machine interfaces (BMIs) (Di Pino et al., 2009; Jerbi et al., 2011).
These correspond to a direct communication path between an enhanced
or wired brain and the powered prostheses.
Noninvasive BCI/BMIs have been used to enable high-level control of
limbs. A BCI-controlled functional electrical stimulation system to restore
upper extremity movements in a person with tetraplegia due to spinal cord
injury has been presented (Pfurtscheller et al., 2003). Various neural machine
interfaces for voluntary control of externally powered upper-limb prostheses
were investigated (Ohnishi et al., 2007; Lebedev and Nicolelis, 2006). The
use of electromyographic interfaces and peripheral nerve interfaces for pros-
thetic control, as well as BMIs suitable for prosthetic control, were examined