
Page 103 - Human Inspired Dexterity in Robotic Manipulation
P. 103
Approaching Human Hand Dexterity Through Highly Biomimetic Design 101
6.4 DEVELOPMENT OF THE HIGHLY BIOMIMETIC
ROBOTIC HAND
In the previous section, we identified the important biomechanical features
that shape the movement of the human hand from an engineering point of
view. Based on what we have learned from the investigation, in this section,
we discuss the methods of replicating these features and briefly describe the
prototyping process of our proposed anthropomorphic robotic hand with
our highly biomimetic design. This robotic hand is composed of one thumb
and four fingers. Different from all other existing robotic hands, its joints
highly mimic their human counterparts by matching not only the structure,
but also the working principles that allow the fluent motions of the
human hand.
6.4.1 The Rapid Prototyping Process of Our Biomimetic
Robotic Hand
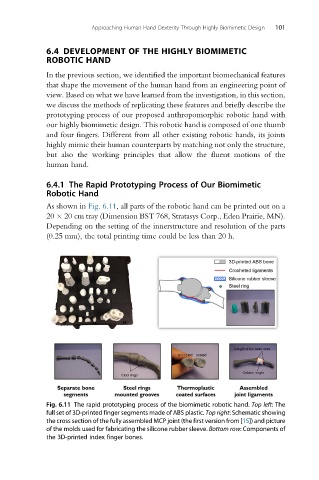
As shown in Fig. 6.11, all parts of the robotic hand can be printed out on a
20 20 cm tray (Dimension BST 768, Stratasys Corp., Eden Prairie, MN).
Depending on the setting of the innerstructure and resolution of the parts
(0.25 mm), the total printing time could be less than 20 h.
Fig. 6.11 The rapid prototyping process of the biomimetic robotic hand. Top left: The
full set of 3D-printed finger segments made of ABS plastic. Top right: Schematic showing
the cross section of the fully assembled MCP joint (the first version from [15]) and picture
of the molds used for fabricating the silicone rubber sleeve. Bottom row: Components of
the 3D-printed index finger bones.