
Page 106 - Introduction to AI Robotics
P. 106
3.4 Perception in Behaviors
a. 89
b.
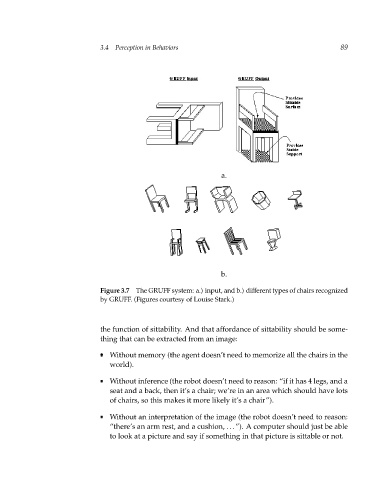
Figure 3.7 The GRUFF system: a.) input, and b.) different types of chairs recognized
by GRUFF. (Figures courtesy of Louise Stark.)
the function of sittability. And that affordance of sittability should be some-
thing that can be extracted from an image:
Without memory (the agent doesn’t need to memorize all the chairs in the
world).
Without inference (the robot doesn’t need to reason: “if it has 4 legs, and a
seat and a back, then it’s a chair; we’re in an area which should have lots
of chairs, so this makes it more likely it’s a chair”).
Without an interpretation of the image (the robot doesn’t need to reason:
“there’s an arm rest, and a cushion, ...”). A computer should just be able
to look at a picture and say if something in that picture is sittable or not.