
Page 178 - Introduction to AI Robotics
P. 178
5.2 Behaviors as Objects in OOP
follow corridor 161
vector summation of MS
Motor Motor Perceptual
Schema 1: Schema 2: Schema 1:
perpendicular uniform find-walls
(polar plot)
a.
follow corridor
vector summation of behaviors
Behavior 1: Behavior 1:
follow-wall follow-wall
(left) (right)
Motor Perceptual
Schema: Schema:
follow-wall find-walls
(which-side) (polar plot)
b.
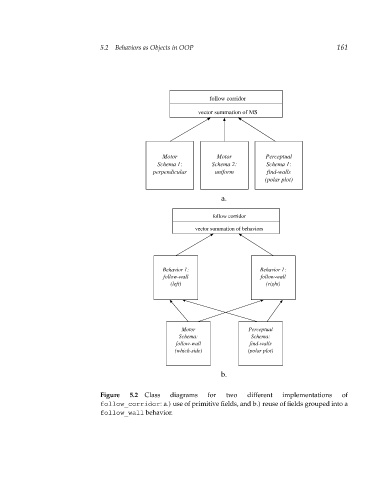
Figure 5.2 Class diagrams for two different implementations of
follow_corridor: a.) use of primitive fields, and b.) reuse of fields grouped into a
follow_wall behavior.