
Page 326 - Introduction to AI Robotics
P. 326
8.7 Summary
time Robot 1 Robot 2 309
0 find-stationary-asteroid find-stationary-asteroid
1 sees A1 sees A1
2 move-to-asteroid(A1) move-to-asteroid(A1)
3 arrives at A1 resumes find-stationary-asteroid
4 push-asteroid-to-home(A1) find-stationary-asteroid
T1-acquiescence++ T1-impatience++
5 push-asteroid-to-home(A1) sees A2
T1-acquiescence++ T1-impatience++
6 push-asteroid-to-home(A1) move-to-asteroid(A2)
T1-acquiescence++ T1-impatience++
7 push-asteroid-to-home(A1) push-asteroid-to-home(A2)
T1-acquiescence++ T1-impatience>limit
T2-impatience++ put T1 on stack
T2-acquiescence++
8 push-asteroid-to-home(A1) push-asteroid-to-home(A2)
T1-acquiescence++ A1-impatience++
T2-impatience++ T2-acquiescence++
9 T1-acquiescence>limit push-asteroid-to-home(A2)
gives up on T1 T2-acquiescence++
find-stationary-asteroid
T2-impatience++
10 T2-impatience>limit T2-acquiescence++
now attempts T2
move-to-asteroid(A2)
11 push-asteroid-to-home(A2) push-asteroid-to-home(A2)
T2-acquiescence = 0 T2-acquiescence = 0
12 arrives at HOME arrives at HOME
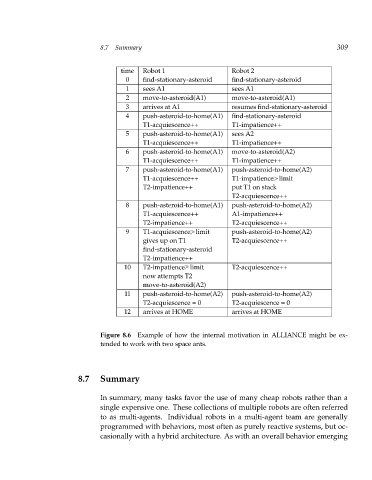
Figure 8.6 Example of how the internal motivation in ALLIANCE might be ex-
tended to work with two space ants.
8.7 Summary
In summary, many tasks favor the use of many cheap robots rather than a
single expensive one. These collections of multiple robots are often referred
to as multi-agents. Individual robots in a multi-agent team are generally
programmed with behaviors, most often as purely reactive systems, but oc-
casionally with a hybrid architecture. As with an overall behavior emerging