
Page 223 - Introduction to Autonomous Mobile Robots
P. 223
208
1 Chapter 5
2
3
18 17 13 7
16 14 12 10 8 6 4
15 11 9
5
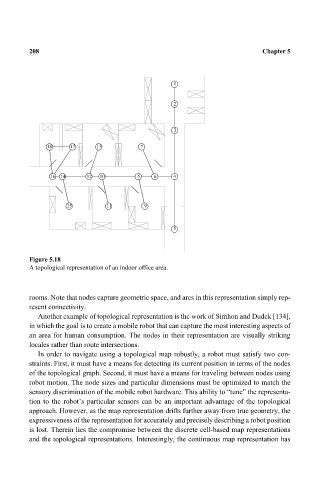
Figure 5.18
A topological representation of an indoor office area.
rooms. Note that nodes capture geometric space, and arcs in this representation simply rep-
resent connectivity.
Another example of topological representation is the work of Simhon and Dudek [134],
in which the goal is to create a mobile robot that can capture the most interesting aspects of
an area for human consumption. The nodes in their representation are visually striking
locales rather than route intersections.
In order to navigate using a topological map robustly, a robot must satisfy two con-
straints. First, it must have a means for detecting its current position in terms of the nodes
of the topological graph. Second, it must have a means for traveling between nodes using
robot motion. The node sizes and particular dimensions must be optimized to match the
sensory discrimination of the mobile robot hardware. This ability to “tune” the representa-
tion to the robot’s particular sensors can be an important advantage of the topological
approach. However, as the map representation drifts further away from true geometry, the
expressiveness of the representation for accurately and precisely describing a robot position
is lost. Therein lies the compromise between the discrete cell-based map representations
and the topological representations. Interestingly, the continuous map representation has