
Page 287 - LEGO MINDSTORMS - Robotics Invention System-2 Projects
P. 287
Robot 9 • The SpinnerBot
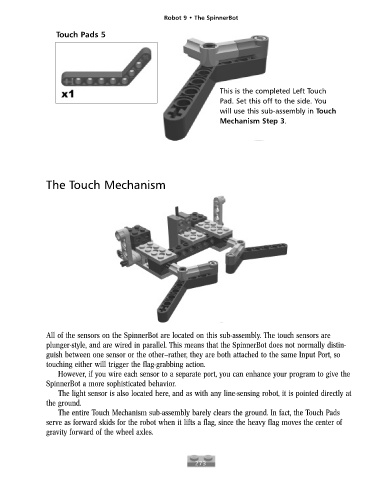
Touch Pads 5
This is the completed Left Touch
Pad. Set this off to the side. You
will use this sub-assembly in Touch
Mechanism Step 3.
The Touch Mechanism
All of the sensors on the SpinnerBot are located on this sub-assembly. The touch sensors are
plunger-style, and are wired in parallel. This means that the SpinnerBot does not normally distin-
guish between one sensor or the other—rather, they are both attached to the same Input Port, so
touching either will trigger the flag-grabbing action.
However, if you wire each sensor to a separate port, you can enhance your program to give the
SpinnerBot a more sophisticated behavior.
The light sensor is also located here, and as with any line-sensing robot, it is pointed directly at
the ground.
The entire Touch Mechanism sub-assembly barely clears the ground. In fact, the Touch Pads
serve as forward skids for the robot when it lifts a flag, since the heavy flag moves the center of
gravity forward of the wheel axles.
273