
Page 50 - Marine Structural Design
P. 50
Chapter 2 Wave Loads for Ship Design and Classfiation 27
HEAVE
3 i
I YAW
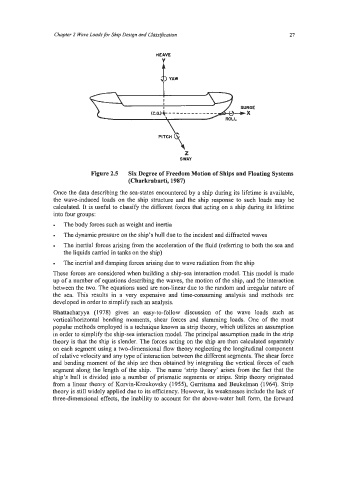
Figure 2.5 Six Degree of Freedom Motion of Ships and Floating Systems
(Charkrabarti, 1987)
Once the data describing the sea-states encountered by a ship during its lifetime is available,
the wave-induced loads on the ship structure and the ship response to such loads may be
calculated. It is useful to classify the different forces that acting on a ship during its lifetime
into four groups:
The body forces such as weight and inertia
The dynamic pressure on the ship’s hull due to the incident and diffracted waves
The inertial forces arising from the acceleration of the fluid (referring to both the sea and
the liquids carried in tanks on the ship)
The inertial and damping forces arising due to wave radiation from the ship
These forces are considered when building a ship-sea interaction model. This model is made
up of a number of equations describing the waves, the motion of the ship, and the interaction
between the two. The equations used are non-linear due to the random and irregular nature of
the sea. This results in a very expensive and time-consuming analysis and methods are
developed in order to simplify such an analysis.
Bhattacharyya (1978) gives an easy-to-follow discussion of the wave loads such as
verticallhorizontal bending moments, shear forces and slamming loads. One of the most
popular methods employed is a technique known as strip theory, which utilizes an assumption
in order to simplify the ship-sea interaction model. The principal assumption made in the strip
theory is that the ship is slender. The forces acting on the ship are then calculated separately
on each segment using a two-dimensional flow theory neglecting the longitudinal component
of relative velocity and any type of interaction between the different segments. The shear force
and bending moment of the ship are then obtained by integrating the vertical forces of each
segment along the length of the ship. The name ‘strip theory’ arises from the fact that the
ship’s hull is divided into a number of prismatic segments or strips. Strip theory originated
from a linear theory of Korvin-Kroukovsky (1955), Gerritsma and Beukelman (1964). Strip
theory is still widely applied due to its efficiency. However, its weaknesses include the lack of
three-dimensional effects, the inability to account for the above-water hull form, the forward