
Page 69 -
P. 69
Ch11-I044963.fm Page 52 Tuesday, August 1, 2006 8:51 PM
Ch11-I044963.fm
52 52 Page 52 Tuesday, August 1, 2006 8:51PM
Gas spring and
Gas spring and TABLE 1
Gas spring and
rack / pinion gear inion gear SPECIFICATION OF THE DEVELOPED LIFT
rack / p
rack / pinion
Lifting weight 90 kg (Normal)
(Human + wheelchair) 150 kg (Maximum)
Lowest height of stage 50 mm
Maximum height of stage 620 mm
Size of stage 1000 X 1000 mm
Enlargem
Enlargementent
Lift weight 110 kg
Assist force by gas springs 100kgf(Approx.)
Driving torque of a wheel 3.3 Nm (Maximum)
4 sets of rollers
14 sets of rollers | Roller diameter 30 mm
4 sets of rollers
Reduce ratio 1/50
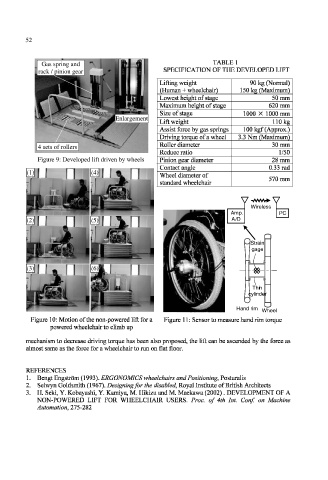
Figure 9: Developed lift driven by w
Figure 9: Developed lift driven by wheels Pinion gear diameter 28 mm
Figure 9: Developed lift driven by wheelsheels
Contact angle 0.33 rad
(4)
(1)
(1) (4)
Wheel diameter of
standard wheelchair 570 mm
Wireless
Wireless
Wir
Am
Amp.
Amp. PC
PC
(5)
(2)
(2) (5) A /D
Strain
gage
(3) (6)
(3)
(6)
Thi
Thinn
cylinder
cylinder
Hand rim
Hand rim Wh h e e l
rim
Hand
Wheel
W
Figure 10: Motion of the non-powered lift for a Figure 11: Sensor to measure hand rim torque
powered wheelchair to climb up
mechanism to decrease driving torque has been also proposed, the lift can be ascended by the force as
almost same as the force for a wheelchair to run on flat floor.
REFERENCES
1. Bengt Engstrom (1993). ERGONOMICS wheelchairs and Positioning, Posturalis
2. Selwyn Goldsmith (1967). Designing for the disabled, Royal Institute of British Architects
3. H. Seki, Y. Kobayashi, Y. Kamiya, M. Hikizu and M. Maekawa (2002). DEVELOPMENT OF A
NON-POWERED LIFT FOR WHEELCHAIR USERS. Proc. of 4th Int. Conf. on Machine
Automation, 275-282