
Page 140 - Rapid Learning in Robotics
P. 140
126 “Mixture-of-Expertise” or “Investment Learning”
Context c
ω parameters
or weights
X
2
X T-Box
1
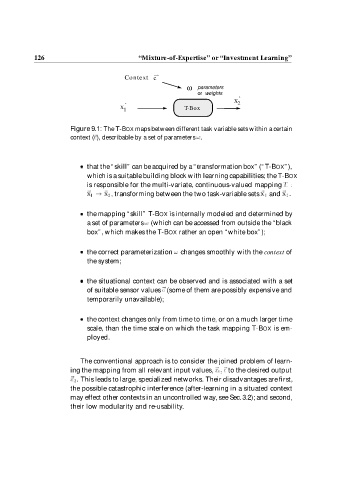
Figure 9.1: The T-BOX maps between different task variable sets within a certain
context ( c), describable by a set of parameters .
that the “skill” can be acquired by a “transformation box” (“T-BOX”),
which is a suitable building block with learning capabilities; the T-BOX
is responsible for the multi-variate, continuous-valued mapping T
x x , transforming between the two task-variable sets x and x .
the mapping “skill” T-BOX is internally modeled and determined by
a set of parameters (which can be accessed from outside the “black
box”, which makes the T-BOX rather an open “white box”);
the correct parameterization changes smoothly with the context of
the system;
the situational context can be observed and is associated with a set
of suitable sensor values c (some of them are possibly expensive and
temporarily unavailable);
the context changes only from time to time, or on a much larger time
scale, than the time scale on which the task mapping T-BOX is em-
ployed.
The conventional approach is to consider the joined problem of learn-
ing the mapping from all relevant input values, x c to the desired output
x . This leads to large, specialized networks. Their disadvantages are first,
the possible catastrophic interference (after-learning in a situated context
may effect other contexts in an uncontrolled way, see Sec. 3.2); and second,
their low modularity and re-usability.