
Page 49 - Robot Builder's Bonanza
P. 49
18 ANATOMY OF A ROBOT
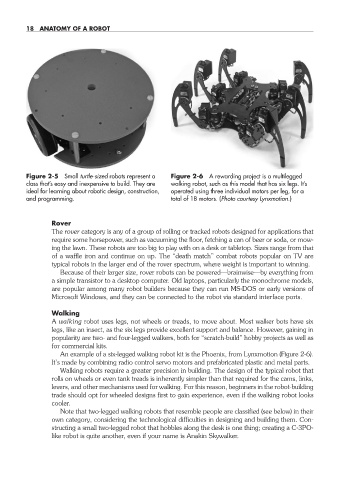
Figure 2-5 Small turtle- sized robots represent a Figure 2-6 A rewarding project is a multilegged
class that’s easy and inexpensive to build. They are walking robot, such as this model that has six legs. It’s
ideal for learning about robotic design, construction, operated using three individual motors per leg, for a
and programming. total of 18 motors. (Photo courtesy Lynxmotion.)
Rover
The rover category is any of a group of rolling or tracked robots designed for applications that
require some horsepower, such as vacuuming the floor, fetching a can of beer or soda, or mow-
ing the lawn. These robots are too big to play with on a desk or tabletop. Sizes range from that
of a waffle iron and continue on up. The “death match” combat robots popular on TV are
typical robots in the larger end of the rover spectrum, where weight is important to winning.
Because of their larger size, rover robots can be powered— brainwise— by everything from
a simple transistor to a desktop computer. Old laptops, particularly the monochrome models,
are popular among many robot builders because they can run MS- DOS or early versions of
Microsoft Windows, and they can be connected to the robot via standard interface ports.
Walking
A walking robot uses legs, not wheels or treads, to move about. Most walker bots have six
legs, like an insect, as the six legs provide excellent support and balance. However, gaining in
popularity are two- and four- legged walkers, both for “scratch- build” hobby projects as well as
for commercial kits.
An example of a six- legged walking robot kit is the Phoenix, from Lynxmotion (Figure 2-6).
It’s made by combining radio control servo motors and prefabricated plastic and metal parts.
Walking robots require a greater precision in building. The design of the typical robot that
rolls on wheels or even tank treads is inherently simpler than that required for the cams, links,
levers, and other mechanisms used for walking. For this reason, beginners in the robot- building
trade should opt for wheeled designs first to gain experience, even if the walking robot looks
cooler.
Note that two- legged walking robots that resemble people are classified (see below) in their
own category, considering the technological difficulties in designing and building them. Con-
structing a small two- legged robot that hobbles along the desk is one thing; creating a C- 3PO-
like robot is quite another, even if your name is Anakin Skywalker.
02-chapter-2.indd 18 4/21/11 11:42 AM