
Page 294 -
P. 294
5.2 Feedback-Linearization Controllers 279
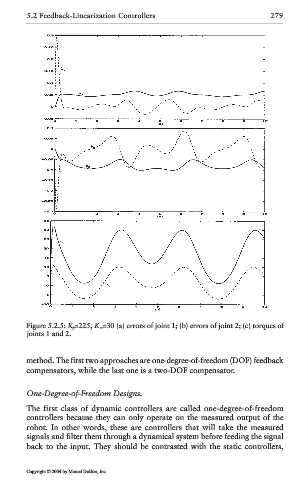
Figure 5.2.5: K p =225, K v =30 (a) errors of joint 1; (b) errors of joint 2; (c) torques of
joints 1 and 2.
method. The first two approaches are one-degree-of-freedom (DOF) feedback
compensators, while the last one is a two-DOF compensator.
One-Degree-of-Freedom Designs.
The first class of dynamic controllers are called one-degree-of-freedom
controllers because they can only operate on the measured output of the
robot. In other words, these are controllers that will take the measured
signals and filter them through a dynamical system before feeding the signal
back to the input. They should be contrasted with the static controllers,
Copyright © 2004 by Marcel Dekker, Inc.