
Page 179 - Schaum's Outline of Theory and Problems of Signals and Systems
P. 179
168 THE Z-TRANSFORM AND DISCRETE-TIME LTI SYSTEMS [CHAP. 4
Again, as before, X(z) may be written as
z
X(z) = - Izl < la1
z-a
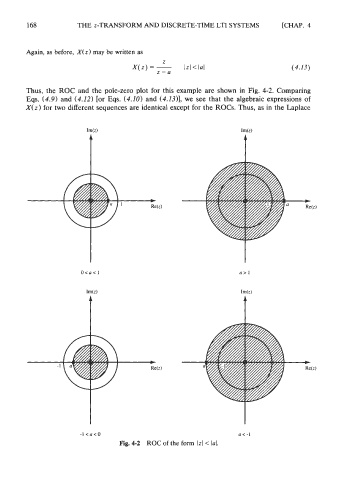
Thus, the ROC and the pole-zero plot for this example are shown in Fig. 4-2. Comparing
Eqs. (4.9) and (4.12) [or Eqs. (4.10) and (4.13)], we see that the algebraic expressions of
X(z) for two different sequences are identical except for the ROCs. Thus, as in the Laplace
Fig. 4-2 ROC of the form I z I< lal.