
Page 117 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 117
92 MOTION PLANNING FOR A MOBILE ROBOT
T T
L 3 L 3
H 3 H 3
L 2 L 2
H 2 H 2
L 1 L 1
H 1 H 1
S S
(a) (b)
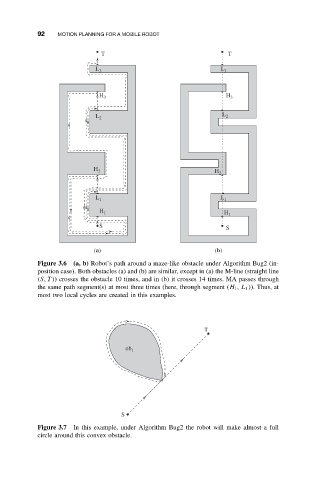
Figure 3.6 (a, b) Robot’s path around a maze-like obstacle under Algorithm Bug2 (in-
position case). Both obstacles (a) and (b) are similar, except in (a) the M-line (straight line
(S, T )) crosses the obstacle 10 times, and in (b) it crosses 14 times. MA passes through
the same path segment(s) at most three times (here, through segment (H 1 , L 1 )). Thus, at
most two local cycles are created in this examples.
T
ob 1
S
Figure 3.7 In this example, under Algorithm Bug2 the robot will make almost a full
circle around this convex obstacle.