
Page 183 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 183
158 ACCOUNTING FOR BODY DYNAMICS: THE JOGGER’S PROBLEM
r u
r u
S
S
T
T
(a) (b)
r u
S r u
S
P
T
T
(c) (d)
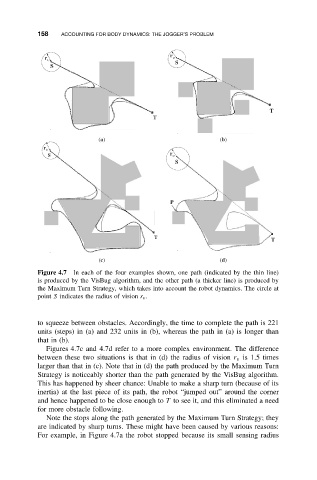
Figure 4.7 In each of the four examples shown, one path (indicated by the thin line)
is produced by the VisBug algorithm, and the other path (a thicker line) is produced by
the Maximum Turn Strategy, which takes into account the robot dynamics. The circle at
point S indicates the radius of vision r v .
to squeeze between obstacles. Accordingly, the time to complete the path is 221
units (steps) in (a) and 232 units in (b), whereas the path in (a) is longer than
that in (b).
Figures 4.7c and 4.7d refer to a more complex environment. The difference
between these two situations is that in (d) the radius of vision r v is 1.5 times
larger than that in (c). Note that in (d) the path produced by the Maximum Turn
Strategy is noticeably shorter than the path generated by the VisBug algorithm.
This has happened by sheer chance: Unable to make a sharp turn (because of its
inertia) at the last piece of its path, the robot “jumped out” around the corner
and hence happened to be close enough to T to see it, and this eliminated a need
for more obstacle following.
Note the stops along the path generated by the Maximum Turn Strategy; they
are indicated by sharp turns. These might have been caused by various reasons:
For example, in Figure 4.7a the robot stopped because its small sensing radius