
Page 206 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 206
INTRODUCTION 181
b J 1 l 2
l 2 l 2
J 1
q 2 a
l 1
l 1
l 1
J 1
q 1 J o
J o
q 1
J o
(a) (b) (c)
q 2 J 1
J 1
l 2
l 1
q 1 J o
J o
(d) (e)
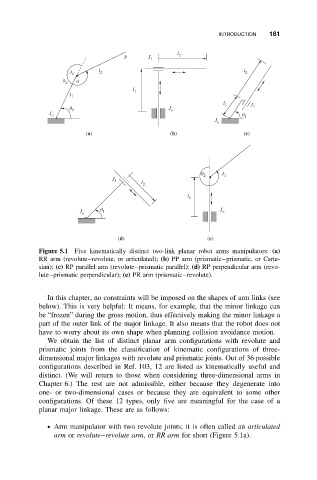
Figure 5.1 Five kinematically distinct two-link planar robot arms manipulators: (a)
RR arm (revolute–revolute, or articulated); (b) PP arm (prismatic–prismatic, or Carte-
sian); (c) RP parallel arm (revolute–prismatic parallel); (d) RP perpendicular arm (revo-
lute–prismatic perpendicular); (e) PR arm (prismatic–revolute).
In this chapter, no constraints will be imposed on the shapes of arm links (see
below). This is very helpful: It means, for example, that the minor linkage can
be “frozen” during the gross motion, thus effectively making the minor linkage a
part of the outer link of the major linkage. It also means that the robot does not
have to worry about its own shape when planning collision avoidance motion.
We obtain the list of distinct planar arm configurations with revolute and
prismatic joints from the classification of kinematic configurations of three-
dimensional major linkages with revolute and prismatic joints. Out of 36 possible
configurations described in Ref. 103, 12 are listed as kinematically useful and
distinct. (We will return to those when considering three-dimensional arms in
Chapter 6.) The rest are not admissible, either because they degenerate into
one- or two-dimensional cases or because they are equivalent to some other
configurations. Of these 12 types, only five are meaningful for the case of a
planar major linkage. These are as follows:
• Arm manipulator with two revolute joints; it is often called an articulated
arm or revolute–revolute arm,or RR arm for short (Figure 5.1a).