
Page 282 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 282
TOPOLOGY OF ARM’S FREE CONFIGURATION SPACE 257
patch
cylinder
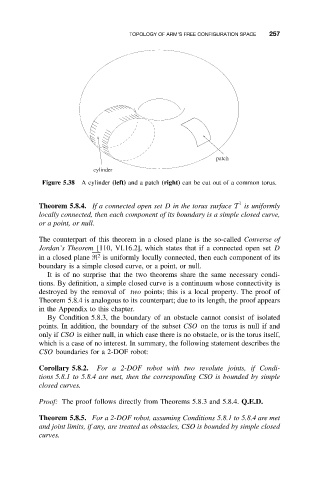
Figure 5.38 A cylinder (left) and a patch (right) can be cut out of a common torus.
1
Theorem 5.8.4. If a connected open set D in the torus surface T is uniformly
locally connected, then each component of its boundary is a simple closed curve,
or a point, or null.
The counterpart of this theorem in a closed plane is the so-called Converse of
Jordan’s Theorem [110, VI.16.2], which states that if a connected open set D
2
in a closed plane is uniformly locally connected, then each component of its
boundary is a simple closed curve, or a point, or null.
It is of no surprise that the two theorems share the same necessary condi-
tions. By definition, a simple closed curve is a continuum whose connectivity is
destroyed by the removal of two points; this is a local property. The proof of
Theorem 5.8.4 is analogous to its counterpart; due to its length, the proof appears
in the Appendix to this chapter.
By Condition 5.8.3, the boundary of an obstacle cannot consist of isolated
points. In addition, the boundary of the subset CSO on the torus is null if and
only if CSO is either null, in which case there is no obstacle, or is the torus itself,
which is a case of no interest. In summary, the following statement describes the
CSO boundaries for a 2-DOF robot:
Corollary 5.8.2. For a 2-DOF robot with two revolute joints, if Condi-
tions 5.8.1 to 5.8.4 are met, then the corresponding CSO is bounded by simple
closed curves.
Proof: The proof follows directly from Theorems 5.8.3 and 5.8.4. Q.E.D.
Theorem 5.8.5. For a 2-DOF robot, assuming Conditions 5.8.1 to 5.8.4 are met
and joint limits, if any, are treated as obstacles, CSO is bounded by simple closed
curves.