
Page 192 - Socially Intelligent Agents Creating Relationships with Computers and Robots
P. 192
Experiences with Sparky, a Social Robot 175
a global emotional state is set. Sparky’s onboard computer interprets these
commands to drive all 10 degrees of freedom. Sparky appears autonomous to
those around it.
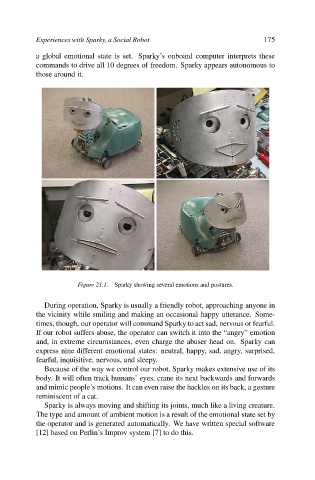
Figure 21.1. Sparky showing several emotions and postures.
During operation, Sparky is usually a friendly robot, approaching anyone in
the vicinity while smiling and making an occasional happy utterance. Some-
times, though, our operator will command Sparky to act sad, nervous or fearful.
If our robot suffers abuse, the operator can switch it into the “angry” emotion
and, in extreme circumstances, even charge the abuser head on. Sparky can
express nine different emotional states: neutral, happy, sad, angry, surprised,
fearful, inquisitive, nervous, and sleepy.
Because of the way we control our robot, Sparky makes extensive use of its
body. It will often track humans’ eyes, crane its next backwards and forwards
and mimic people’s motions. It can even raise the hackles on its back, a gesture
reminiscent of a cat.
Sparky is always moving and shifting its joints, much like a living creature.
The type and amount of ambient motion is a result of the emotional state set by
the operator and is generated automatically. We have written special software
[12] based on Perlin’s Improv system [7] to do this.