
Page 48 - Socially Intelligent Agents Creating Relationships with Computers and Robots
P. 48
Modeling Social Relationship 31
social relations goals goals social relations
goals
perceived dispositions perceived dispositions
overall plans overall plans
disposition
and expectation
plan person plan person
specific joint plans specific joint plans
perceived actions and relations perceived actions and relations
joint plan
execution
perceived positions and movements detailed plans for self detailed plans for self perceived positions and movements
detailed action
sensor system motor system motor system sensor system
environment
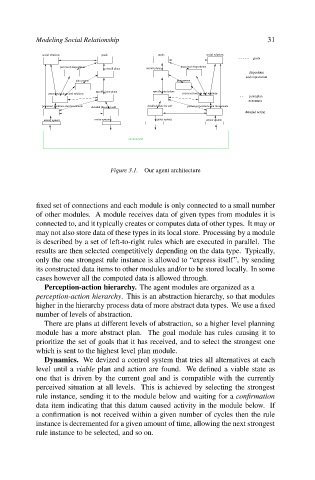
Figure 3.1. Our agent architecture
fixed set of connections and each module is only connected to a small number
of other modules. A module receives data of given types from modules it is
connected to, and it typically creates or computes data of other types. It may or
may not also store data of these types in its local store. Processing by a module
is described by a set of left-to-right rules which are executed in parallel. The
results are then selected competitively depending on the data type. Typically,
only the one strongest rule instance is allowed to “express itself”, by sending
its constructed data items to other modules and/or to be stored locally. In some
cases however all the computed data is allowed through.
Perception-action hierarchy. The agent modules are organized as a
perception-action hierarchy. This is an abstraction hierarchy, so that modules
higher in the hierarchy process data of more abstract data types. We use a fixed
number of levels of abstraction.
There are plans at different levels of abstraction, so a higher level planning
module has a more abstract plan. The goal module has rules causing it to
prioritize the set of goals that it has received, and to select the strongest one
which is sent to the highest level plan module.
Dynamics. We devized a control system that tries all alternatives at each
level until a viable plan and action are found. We defined a viable state as
one that is driven by the current goal and is compatible with the currently
perceived situation at all levels. This is achieved by selecting the strongest
rule instance, sending it to the module below and waiting for a confirmation
data item indicating that this datum caused activity in the module below. If
a confirmation is not received within a given number of cycles then the rule
instance is decremented for a given amount of time, allowing the next strongest
rule instance to be selected, and so on.