
Page 120 - The Definitive Guide to Building Java Robots
P. 120
Preston_5564C03.fm Page 101 Wednesday, October 5, 2005 7:21 AM
CHAPTER 3 ■ MOTION 101
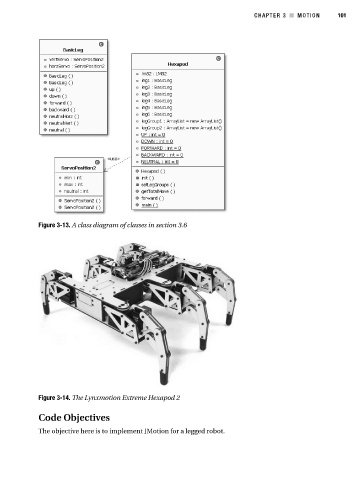
Figure 3-13. A class diagram of classes in section 3.6
Figure 3-14. The Lynxmotion Extreme Hexapod 2
Code Objectives
The objective here is to implement JMotion for a legged robot.
97022d2480fe4a63cfdfa123a6e70098