
Page 255 - The Definitive Guide to Building Java Robots
P. 255
Preston_5564C07.fm Page 236 Monday, September 26, 2005 5:38 AM
236 CHAPTER 7 ■ NAVIGATION
• Data Structures: Describing holding of the information coming from the
microcontroller
• Sensor Data Retrieval: Describing the exact mechanisms for requesting data from the
microcontroller for my robot configuration
The next section will demonstrate the most basic navigational process: dead reckoning.
7.1 Navigation Basics
The most basic type of navigational process is dead reckoning. Dead reckoning is the process
of deducing the position of a vehicle or robot based on course and distance. To perform this
type of navigation you need a way of measuring both heading and distance.
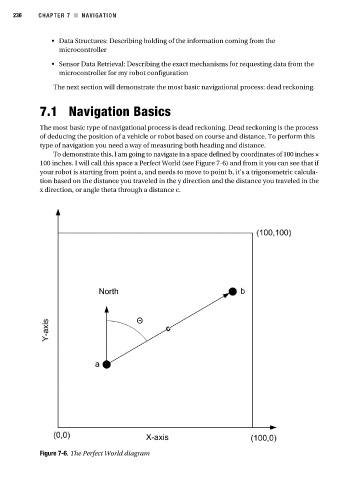
To demonstrate this, I am going to navigate in a space defined by coordinates of 100 inches ×
100 inches. I will call this space a Perfect World (see Figure 7-6) and from it you can see that if
your robot is starting from point a, and needs to move to point b, it’s a trigonometric calcula-
tion based on the distance you traveled in the y direction and the distance you traveled in the
x direction, or angle theta through a distance c.
Figure 7-6. The Perfect World diagram