
Page 39 - The Unofficial Guide to Lego Mindstorms Robots
P. 39
28
Figure 2-7.
Independent drive wheel s
Zero turning radius is nice in robots that measure how far each wheel travels. (You could do this using rotation sensors.) Once
you know how far each wheel on a differential drive robot has traveled, you can calculate with a fair degree of accuracy the
location of the robot relative to its starting point.
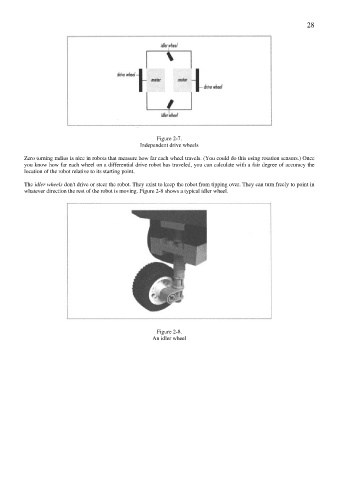
T he idler wheels don't drive or steer the robot. They exist to keep the robot from tipping over. They can turn freely to point in
whatever direction the rest of the robot is moving. Figure 2-8 sho s a typical idler wheel.
w
Figure 2-8.
An idler wheel