
Page 62 - The Unofficial Guide to Lego Mindstorms Robots
P. 62
51
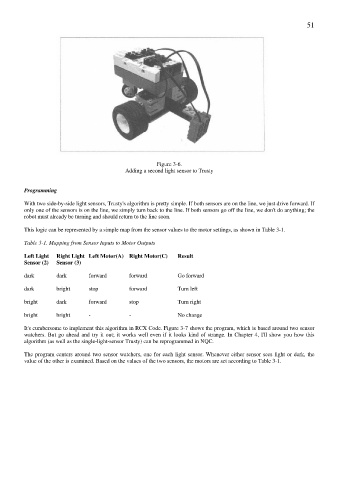
Figure 3-6.
Adding a second light sensor to Trusty
Programming
With two side-by-side light sensors, Trusty's algo rithm is pretty simple. If both sensors are on the line, we just drive forward. If
only one of the sensors is on the line, we simply turn back to the line. If both sensors go off the line, we don't do anything; the
robot must already be turning and should return to the line soon.
This logic can be represented by a simple map from the sensor values to the motor settings, as shown in Table 3-1.
Table 3-1. Mapping from Sensor Inputs to Motor Outputs
Left Light Right Light Left Motor(A) Right Motor(C) Result
Sensor (2) Sensor (3)
dark dark forward forward Go forward
dark bright stop forward Turn left
bright dark forward stop Turn right
bright bright - - No change
It's cumbersome to implement this algorithm in RCX Code. Figure 3-7 shows the program, which is based around two sensor
watchers. But go ahead and try it out; it works well even if it looks kind of strange. In Chapter 4, I'll show you how this
algorithm (as well as the single-light-sensor Trusty) can be reprogrammed in NQC.
The program centers around two sensor watchers, one for each light sensor. Whenever either sensor sees light or dark, the
value of the other is examined. Based on the values of the two sensors, the motors are set according to Table 3-1.