
Page 32 - The Mechatronics Handbook
P. 32
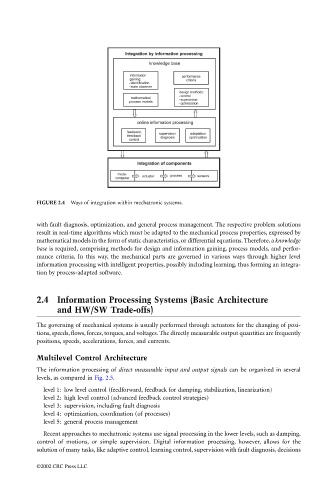
FIGURE 2.4 Ways of integration within mechatronic systems.
with fault diagnosis, optimization, and general process management. The respective problem solutions
result in real-time algorithms which must be adapted to the mechanical process properties, expressed by
mathematical models in the form of static characteristics, or differential equations. Therefore, a knowledge
base is required, comprising methods for design and information gaining, process models, and perfor-
mance criteria. In this way, the mechanical parts are governed in various ways through higher level
information processing with intelligent properties, possibly including learning, thus forming an integra-
tion by process-adapted software.
2.4 Information Processing Systems (Basic Architecture
and HW/SW Trade-offs)
The governing of mechanical systems is usually performed through actuators for the changing of posi-
tions, speeds, flows, forces, torques, and voltages. The directly measurable output quantities are frequently
positions, speeds, accelerations, forces, and currents.
Multilevel Control Architecture
The information processing of direct measurable input and output signals can be organized in several
levels, as compared in Fig. 2.5.
level 1: low level control (feedforward, feedback for damping, stabilization, linearization)
level 2: high level control (advanced feedback control strategies)
level 3: supervision, including fault diagnosis
level 4: optimization, coordination (of processes)
level 5: general process management
Recent approaches to mechatronic systems use signal processing in the lower levels, such as damping,
control of motions, or simple supervision. Digital information processing, however, allows for the
solution of many tasks, like adaptive control, learning control, supervision with fault diagnosis, decisions
©2002 CRC Press LLC