
Page 21 - Welding Robots Technology, System Issues, and Applications
P. 21
5
Introduction and Overview
Consequently, the task of automating the welding operation is to reproduce the
experienced and skilled manual welder in terms of positioning the welding torch,
and controlling the welding parameters. That means availability of databases that
register known cases, from where initial conditions can be selected, along with
type of shielding gases and wires. That means also the capacity to observe the
ongoing process and adjust or adapt the controlling parameters in accordance with
the desired results. And finally, the possibility of holding the welding torch and
move it in a precise and controlled way. Therefore, as previously mentioned,
automating the welding process is a mixture of robotics research, control systems
research, sensor research, sensor fusion and artificial intelligence.
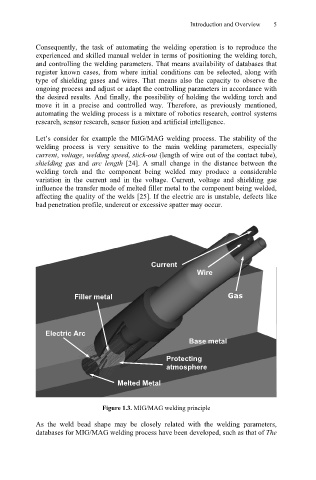
Let’s consider for example the MIG/MAG welding process. The stability of the
welding process is very sensitive to the main welding parameters, especially
current, voltage, welding speed, stick-out (length of wire out of the contact tube),
shielding gas and arc length [24]. A small change in the distance between the
welding torch and the component being welded may produce a considerable
variation in the current and in the voltage. Current, voltage and shielding gas
influence the transfer mode of melted filler metal to the component being welded,
affecting the quality of the welds [25]. If the electric arc is unstable, defects like
bad penetration profile, undercut or excessive spatter may occur.
Current
Wire
Filler metal Gas
Electric Arc
Base metal
Protecting
atmosphere
Melted Metal
Figure 1.3. MIG/MAG welding principle
As the weld bead shape may be closely related with the welding parameters,
databases for MIG/MAG welding process have been developed, such as that of The