
Page 96 - Mechanics of Microelectromechanical Systems
P. 96
227_LEGO_DSR_04.qxd 7/23/02 4:35 PM Page 83
Robot 4 • Go-Rilla
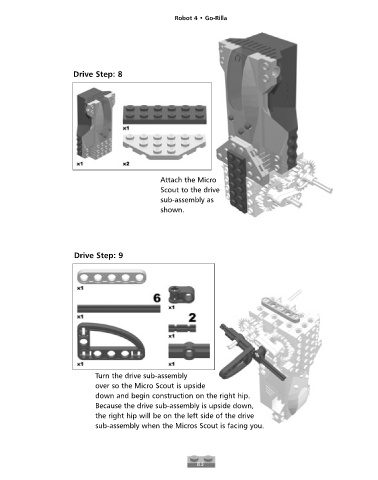
Drive Step: 8
Attach the Micro
Scout to the drive
sub-assembly as
shown.
Drive Step: 9
Turn the drive sub-assembly
over so the Micro Scout is upside
down and begin construction on the right hip.
Because the drive sub-assembly is upside down,
the right hip will be on the left side of the drive
sub-assembly when the Micros Scout is facing you.
83