
Page 330 - Lego Mindstorms
P. 330
Robot 10 • RIS Turtle
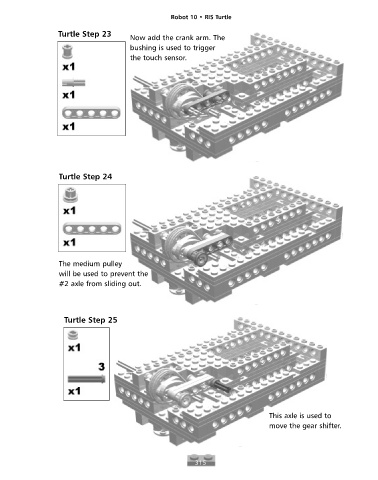
Turtle Step 23
Now add the crank arm. The
bushing is used to trigger
the touch sensor.
Turtle Step 24
The medium pulley
will be used to prevent the
#2 axle from sliding out.
Turtle Step 25
This axle is used to
move the gear shifter.
315