
Page 285 - ARM 64 Bit Assembly Language
P. 285
274 Chapter 8
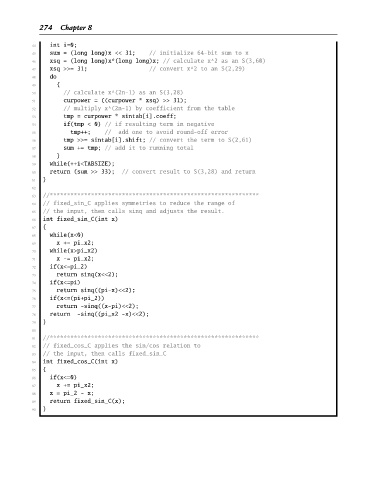
44 int i=0;
45 sum = (long long)x << 31; // initialize 64-bit sum to x
46 xsq = (long long)x*(long long)x; // calculate x^2 as an S(3,60)
47 xsq >>= 31; // convert x^2 to an S(2,29)
48 do
49 {
50 // calculate x^(2n-1) as an S(3,28)
51 curpower = ((curpower * xsq) >> 31);
52 // multiply x^(2n-1) by coefficient from the table
53 tmp = curpower * sintab[i].coeff;
54 if(tmp < 0) // if resulting term in negative
55 tmp++; // add one to avoid round-off error
56 tmp >>= sintab[i].shift; // convert the term to S(2,61)
57 sum += tmp; // add it to running total
58 }
59 while(++i<TABSIZE);
60 return (sum >> 33); // convert result to S(3,28) and return
61 }
62
63 //*************************************************************
64 // fixed_sin_C applies symmetries to reduce the range of
65 // the input, then calls sinq and adjusts the result.
66 int fixed_sin_C(int x)
67 {
68 while(x<0)
69 x += pi_x2;
70 while(x>pi_x2)
71 x -= pi_x2;
72 if(x<=pi_2)
73 return sinq(x<<2);
74 if(x<=pi)
75 return sinq((pi-x)<<2);
76 if(x<=(pi+pi_2))
77 return -sinq((x-pi)<<2);
78 return -sinq((pi_x2 -x)<<2);
79 }
80
81 //*************************************************************
82 // fixed_cos_C applies the sin/cos relation to
83 // the input, then calls fixed_sin_C
84 int fixed_cos_C(int x)
85 {
86 if(x<=0)
87 x += pi_x2;
88 x = pi_2 - x;
89 return fixed_sin_C(x);
90 }