
Page 135 - Adaptive Identification and Control of Uncertain Systems with Nonsmooth Dynamics
P. 135
Adaptive Finite-Time Neural Control of Servo Systems With Non-linear Dead-Zone 131
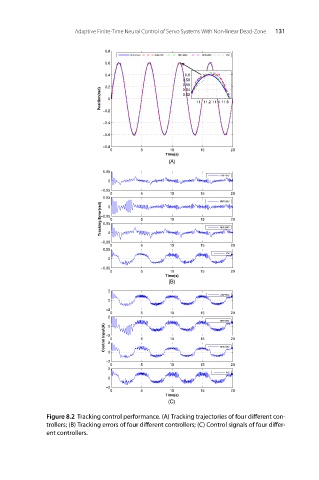
Figure 8.2 Tracking control performance. (A) Tracking trajectories of four different con-
trollers; (B) Tracking errors of four different controllers; (C) Control signals of four differ-
ent controllers.