
Page 226 - Adaptive Identification and Control of Uncertain Systems with Nonsmooth Dynamics
P. 226
Non-singular Terminal Sliding Mode Funnel Control of Servo Systems With Input Saturation 225
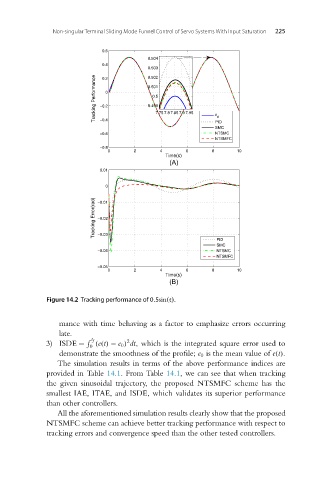
Figure 14.2 Tracking performance of 0.5sin(t).
mance with time behaving as a factor to emphasize errors occurring
late.
t f 2
3) ISDE = (e(t) − e 0 ) dt, which is the integrated square error used to
0
demonstrate the smoothness of the profile; e 0 is the mean value of e(t).
The simulation results in terms of the above performance indices are
provided in Table 14.1.FromTable 14.1, we can see that when tracking
the given sinusoidal trajectory, the proposed NTSMFC scheme has the
smallest IAE, ITAE, and ISDE, which validates its superior performance
than other controllers.
All the aforementioned simulation results clearly show that the proposed
NTSMFC scheme can achieve better tracking performance with respect to
tracking errors and convergence speed than the other tested controllers.