
Page 55 - Artificial Intelligence in the Age of Neural Networks and Brain Computing
P. 55
42 CHAPTER 2 Mind, Brain, Autonomous Agents, and Mental Disorders
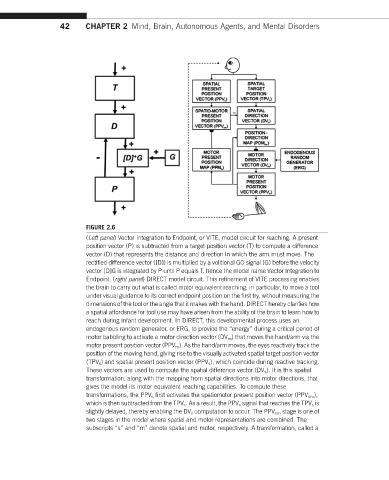
FIGURE 2.6
(Left panel) Vector Integration to Endpoint, or VITE, model circuit for reaching. A present
position vector (P) is subtracted from a target position vector (T) to compute a difference
vector (D) that represents the distance and direction in which the arm must move. The
rectified difference vector ([D]) is multiplied by a volitional GO signal (G) before the velocity
vector [D]G is integrated by P until P equals T, hence the model name Vector Integration to
Endpoint. (right panel) DIRECT model circuit. This refinement of VITE processing enables
the brain to carry out what is called motor equivalent reaching, in particular, to move a tool
under visual guidance to its correct endpoint position on the first try, without measuring the
dimensions of the tool or the angle that it makes with the hand. DIRECT hereby clarifies how
a spatial affordance for tool use may have arisen from the ability of the brain to learn how to
reach during infant development. In DIRECT, this developmental process uses an
endogenous random generator, or ERG, to provide the “energy” during a critical period of
motor babbling to activate a motor direction vector (DV m ) that moves the hand/arm via the
motor present position vector (PPV m ). As the hand/arm moves, the eyes reactively track the
position of the moving hand, giving rise to the visually activated spatial target position vector
(TPV s ) and spatial present position vector (PPV s ), which coincide during reactive tracking.
These vectors are used to compute the spatial difference vector (DV s ). It is this spatial
transformation, along with the mapping from spatial directions into motor directions, that
gives the model its motor equivalent reaching capabilities. To compute these
transformations, the PPV s first activates the spatiomotor present position vector (PPV sm ),
which is then subtracted from the TPV s . As a result, the PPV s signal that reaches the TPV s is
slightly delayed, thereby enabling the DV s computation to occur. The PPV sm stage is one of
two stages in the model where spatial and motor representations are combined. The
subscripts “s” and “m” denote spatial and motor, respectively. A transformation, called a